
Some things I’ve worked on:
101010 – A simple virtual reality puzzle game inspired by 1010!
Created using C# and Unity with a team of five students. I worked on the design and implementation of features such as a grid system, grid rotation, and block placing. I also published the game on Steam. My teammates were Jenny, Changcheng, Miranda, and Eric.
Date: March 2019 – Jan 2020
Steam link: https://store.steampowered.com/app/1081800/101010

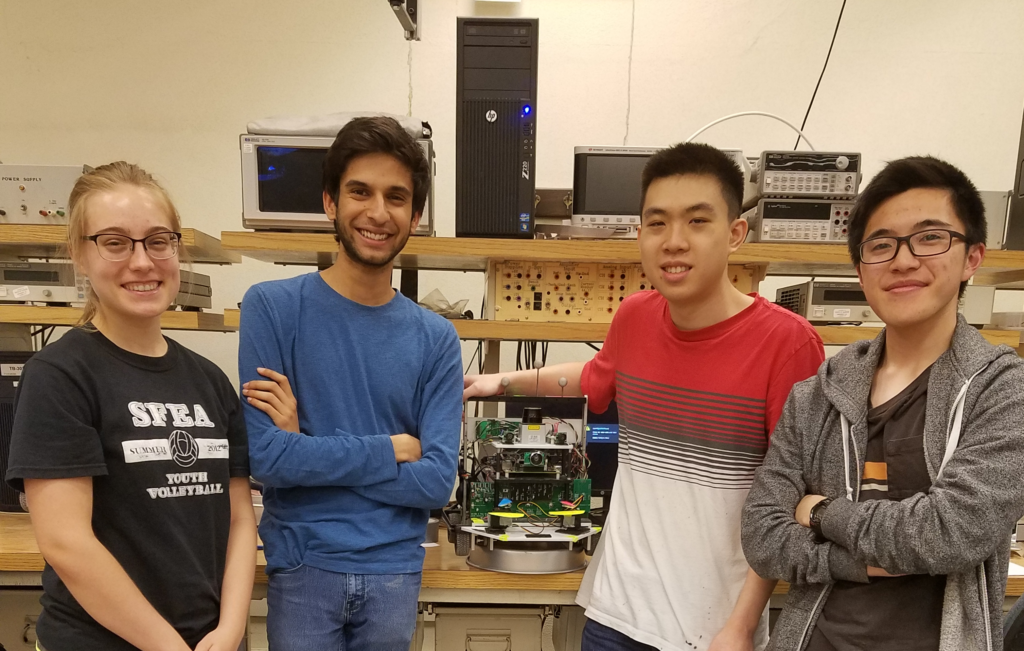
Mechatronics Project – A robot that can visually locate and physically navigate to waypoints while avoiding obstacles in the way.
Worked in a team of four to program the robot using C. I focused mainly on implementing A* (for planning a path to take) and color detection (for locating waypoints). This was a final project for a mechatronics class. My teammates were Keith, Arjun, and RuthAnn.
Date: April 2019 – May 2019
RuthAnn’s page on this: https://rhaefli0.wixsite.com/robot77
Problem specification: http://coecsl.ece.illinois.edu/ge423/ge423_contest.pdf
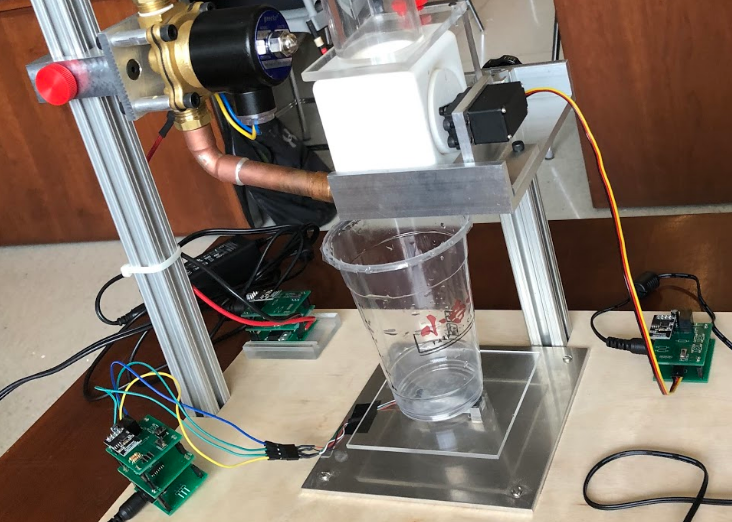
Prototype Boba Station – A prototype of a device for dispensing bubble tea.
Worked in a team of three to build this. I designed and built the weight sensing subsystem, used for precisely measuring bubble tea ingredients. My other two teammates, Timothy and Jordan, created the liquid and solid subsystems. This was for a senior design class.
Date: January 2019 – May 2019
Corresponding Paper: https://courses.engr.illinois.edu/ece445/getfile.asp?id=14906
Reaction Wheel Pendulum – A robot that can balance a pendulum in an upright position.
Programmed the robot with a partner, Kristina, using MATLAB for a final project in a control systems class.
Date: Fall 2018
Video: https://drive.google.com/file/d/1SWVZbgEmHxjv_2c05Wl1flZF47PPlPMI/view?usp=sharing
Dragnot Robotic Arm Project – A robot that can grab and place chess pieces at arbitrary locations on a chess board.
Programmed a simulated UR3 robot with Amitesh in V-REP using Python to grab and place chess pieces at arbitrary locations on a chess board. In the process, I learned about forward kinematics, inverse kinematics, and collision detection.
Date: Spring 2018
Video: https://www.youtube.com/watch?v=_hoX58VI7Jc&list=PLAfFM-5AffXRPtUbenrsllKjKWfReC0cx&index=13&t=0s
Github : https://github.com/Huntz256/Dragnot
391 OS – A simple operating system.
Worked in a team of four students over five weeks to build this in C and x86 assembly.
Date: Spring 2017
Github : https://github.com/Huntz256/391OS
Kouri Chess Engine – A basic chess engine (chess playing program) that can use the UCI (Universal Chess Interface) protocol to connect to user interfaces such as the Arena chess GUI.
Created in C++ with a partner (Minh). At the core of the program is the negamax algorithm, a common variant of the minimax algorithm.
Date: June 2015 – July 2015
Github : https://github.com/Huntz256/kouri